Developed ROS2 software stack for the MoMo robot, a modular research platform at the Institut für Technische Logistik - TUHH, enabling hardware integration and autonomous navigation.
AMRROS2Open Sourcenav2
A 12-degree-of-freedom quadruped robot, designed to emulate the movements of a four-legged animal, demonstrates walking, trotting, and turning capabilities. This robot is showcased at a robotics museum.
KinematicsCAD3D printing
An app designed to help users track their squat exercises . It offers real-time feedback and voice notifications, making it a convenient tool for monitoring squat workouts.
PythonGUISignal Processing
An easy-to-use web interface for controlling a quadruped robot with real-time video streaming and a feature that lets the robot follow a person. It's designed to make interacting with the robot simple and intuitive, combining practical web tools with robotics.
ROSGUIQuadruped
An autonomous delivery robot designed for indoor environments, capable of securely delivering goods while avoiding obstacles.
ROSNavigationAMR
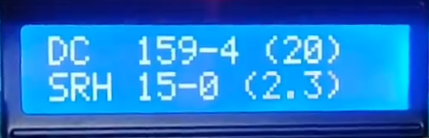
Access the real-time game score on a display using the power of IoT!
MicrocontrollerIoTESP32
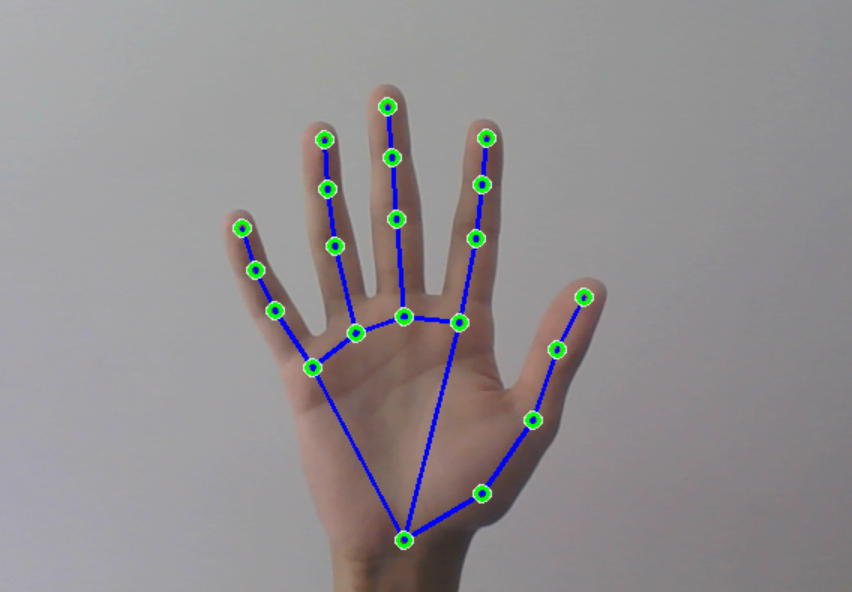
Developed hand gesture control systems using computer vision, applying them to various interactive applications.
PythonArduinoOpenCV
Simulating a robotic surgery using a 7-axis Franka-Emika Panda robot arm.
PythonNumPyROS
Not your usual habit tracking app. Build routines, uncover insights, and reach your goals with ease!
PythonStreamlitImage Processing
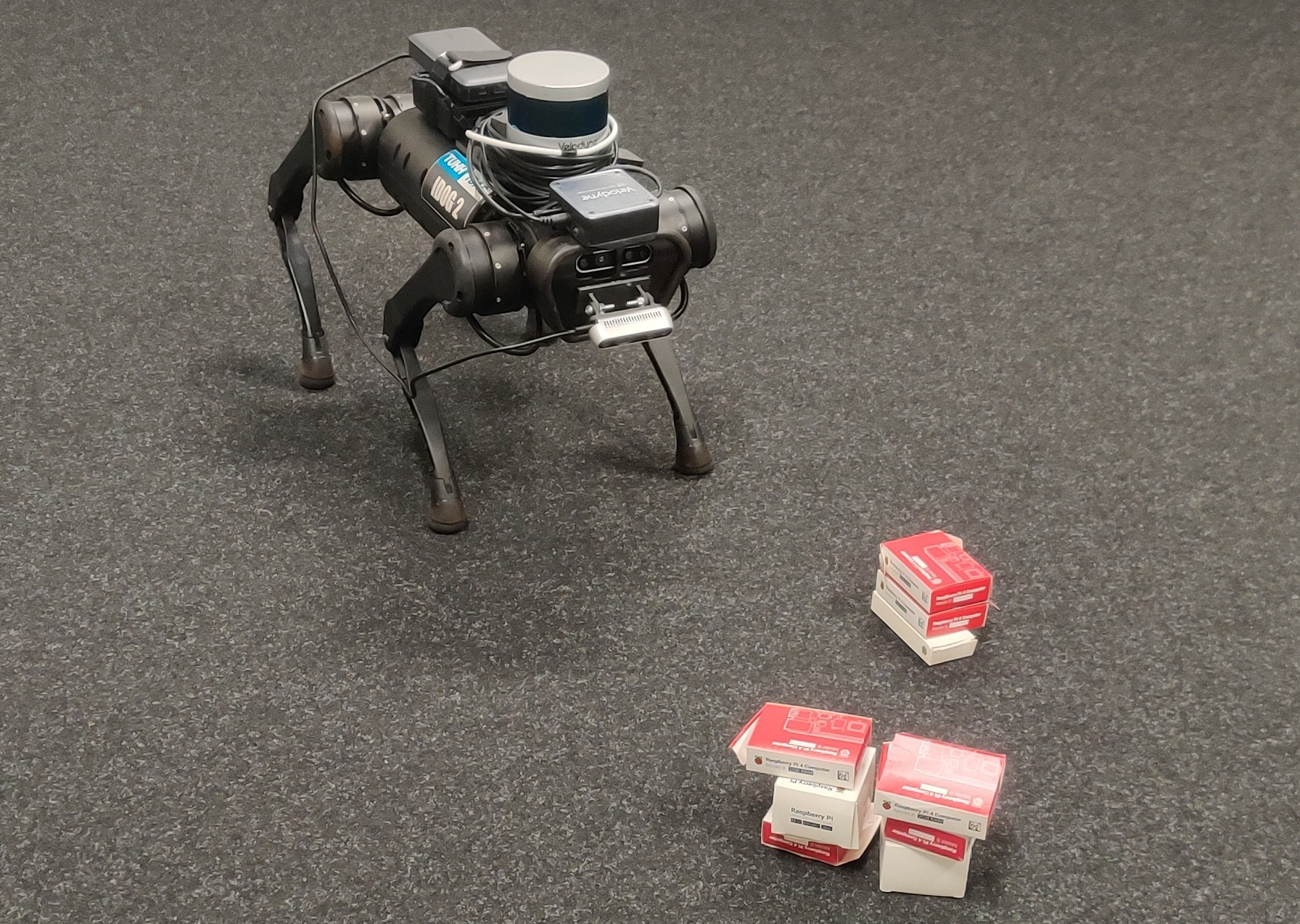
Built a system for quadruped robots to navigate around obstacles using real-time elevation maps.
C++ROSQuadruped