Web-Based GUI Application for Controlling a ROS-Based Quadruped Robot
Overview
This project is a web-based GUI application designed to give users intuitive control over a quadruped robot. It features real-time video streaming from the robot’s camera and a human-following mode.
Key Features
- Interactive User Interface:
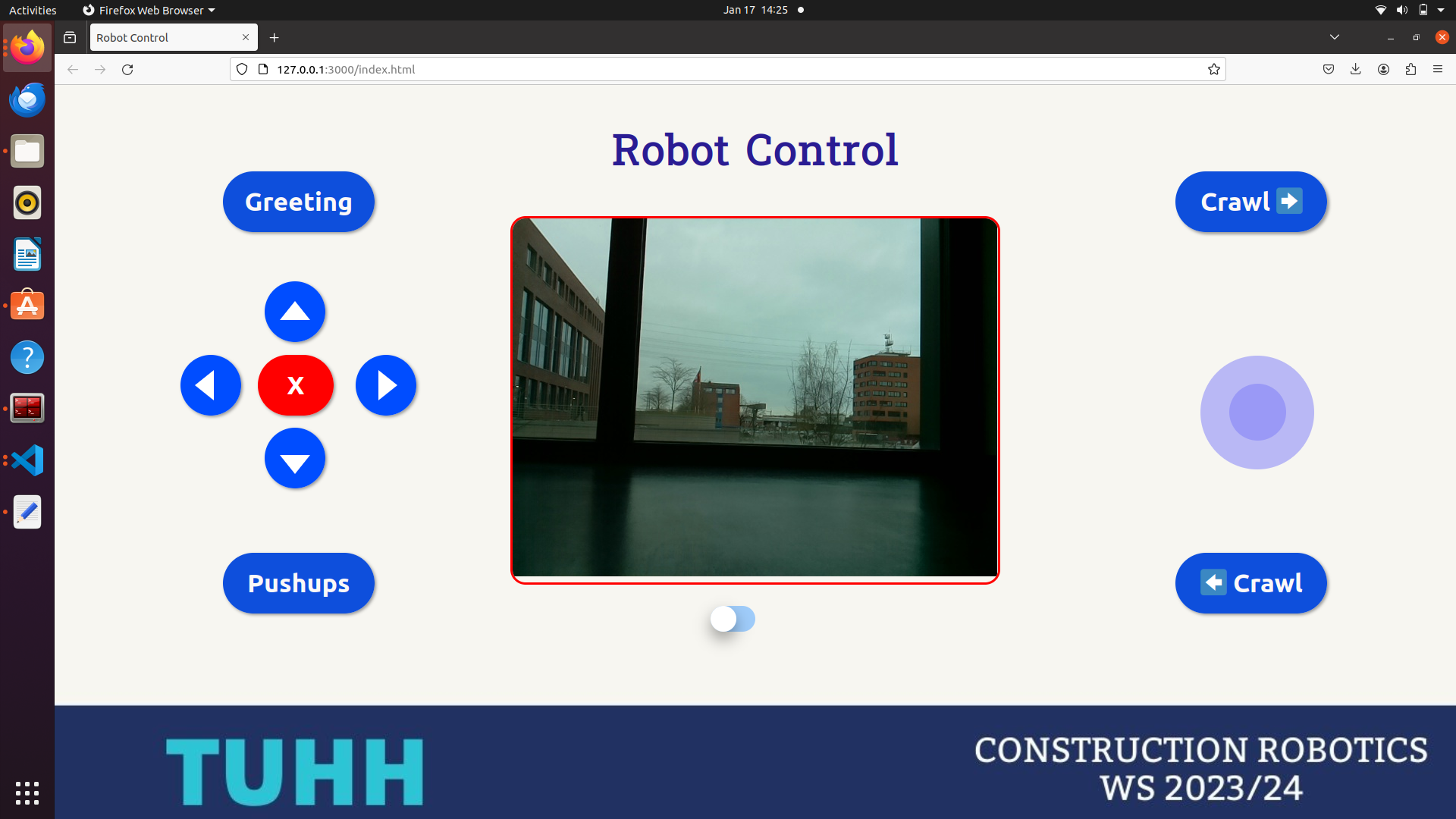
- The user-friendly web-based GUI lets you control the robot with directional buttons and a joystick. There are also buttons for predefined actions like making the robot greet or do pushups.
- You can watch the robot’s live video feed right in the GUI, giving you a real-time view of what the robot sees.
- Dual Control Modes:
- Teleoperation Mode: Take direct control of the robot’s movements with the directional buttons and joystick.
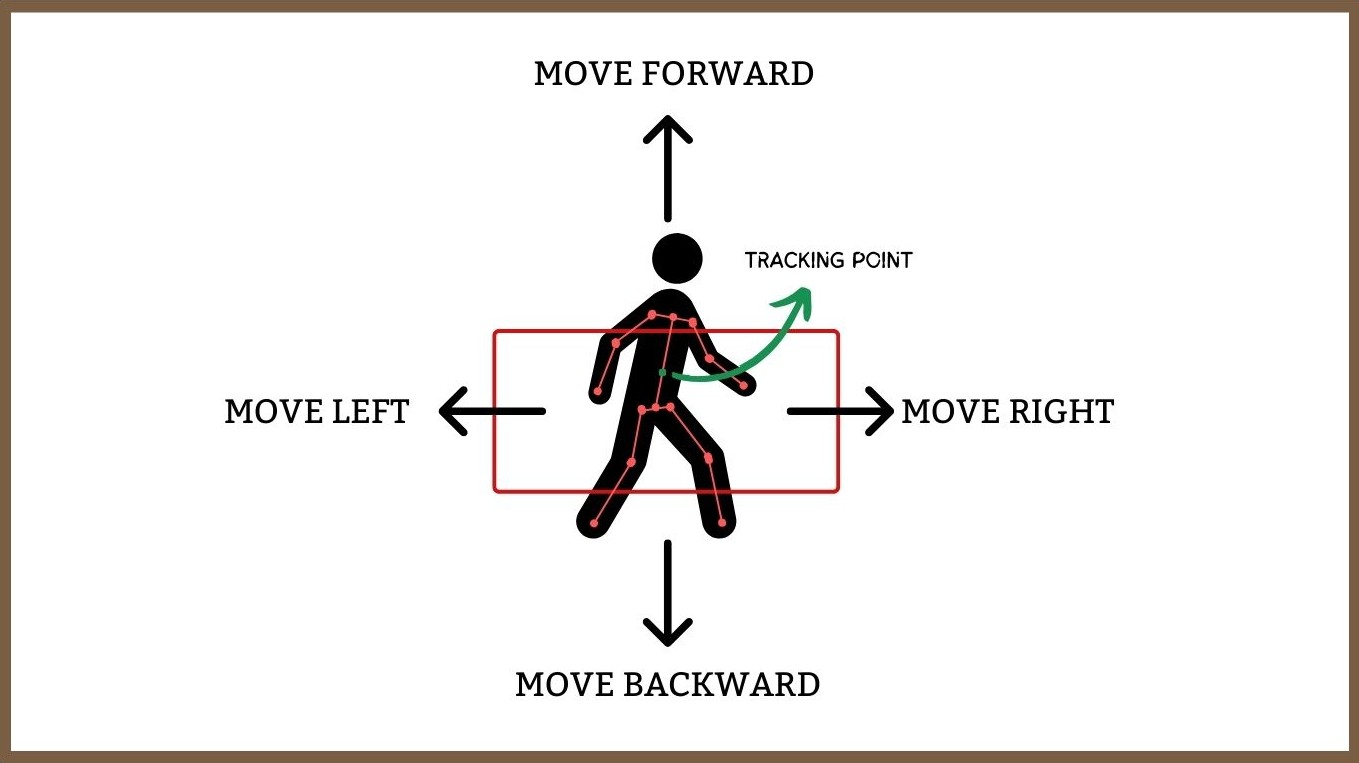
- Human-Following Mode: Let the robot follow you! Using the MediaPipe library from Google, the robot detects human body landmarks and follows a point on the abdomen to move in sync with you.
- Technologies Behind the Scenes:
- Frontend: Built with HTML, CSS, and JavaScript for a responsive and engaging user experience.
- Backend: Utilizes ROS and Rosbridge to handle communication between the GUI and the robot.
- Video Streaming: The live feed from the robot’s camera is published on a ROS topic and integrated into the GUI.
- Overcoming Challenges:
- Latency Issues: We faced some latency problems due to the university’s Wi-Fi network, which affected real-time performance. As a workaround, we used a mobile hotspot to connect all systems on the same network, reducing lag and improving responsiveness.
- Course Project Insight:
- This project was part of a university course called Construction Robotics. We wrote a paper about it, detailing our approach and findings. You can check it out here.
Technical Details
- Frontend Development:
- The GUI is designed with HTML, CSS, and JavaScript, providing an interactive and visually appealing interface.
- Real-time video streaming from the robot’s camera is integrated directly into the GUI for immediate feedback.
- Backend Integration:
- Rosbridge is used to facilitate communication between the web-based GUI and the ROS backend.
- ROS topics handle the control commands and video data streaming, ensuring smooth operation.
- Human-Following Feature:
- Using Google’s MediaPipe library, the robot detects and tracks human body landmarks.
- The robot follows a designated point on the abdomen, which directs its movement.
Github repository for this project can be found here.